Local representations vs. Distributed representations
Local vs. distributed representation is one of the most basic and useful dichotomies for thinking about problem formulations.
We can understand the difference between the two in the following picture from Bhaskar Mitra:
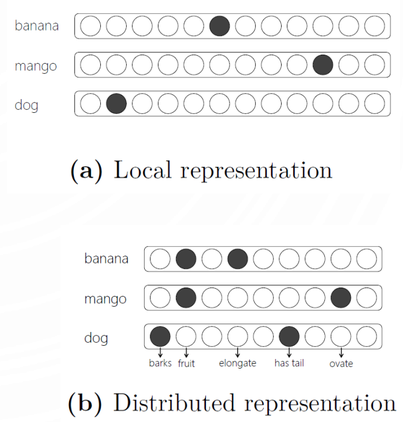
In (a), the local representation, each concept gets its own distinct set of parameters. The picture illustrates this with one-hot encodings, where each possible one-hot vector stands for a single concept (e.g., banana, mango, dog).
In (b), the distributed representation, each concept is represented by some combination of parameters.
The choice makes a big difference in practice. The number of concepts a local representation can encode is linear in the number of parameters; the number a distributed representation can encode is roughly exponential in the number of parameters (see this talk by Ruslan Salakhutdinov at the 26:53 mark). So a distributed representation can describe far more complicated concepts with far fewer parameters.
This work is licensed under CC BY-SA 4.0. Last modified: July 09, 2026.
Website built with Franklin.jl and the Julia language.